编写控制程序-驱动类
驱动类模块用于驱动直流电机、伺服电机,显示数据,延时,设置传感器等。
直流电机驱动
“直流电机驱动”模块用于驱动单个直流电机,将指定端口的直流电机按指定的速度和方向旋转。
“直流电机驱动”模块有左、右2个容器,左容器放置要驱动的直流电机端口,可放置“机器人端口”、整型常量、整型变量等。右容器放置表示速度和方向的数值,可放置整型常量、整型变量、结果为整型的算术表达式等。
右容器中的数值表示转速,一般情况下正数为正转,负数为反转。
“直流电机驱动”模块无须设置属性可正常工作。

多直流电机驱动

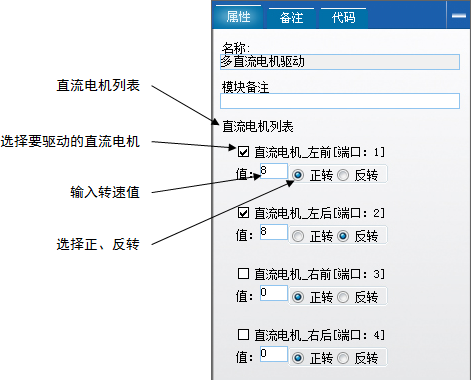
“多直流电机驱动”模块用于驱动一个或多个直流电机,在属性面板中设置要驱动的直流电机,并设置驱动参数。
“多直流电机驱动”模块的属性面板中列出了控制程序关联的机器人上安装的所有直流电机(已安装并设置了端口),在列表中勾选要驱动的直流电机,输入转速值(只能是正值),选择正、反转。未勾选的直流电机不受影响,仍保持各自的驱动状态。
停止直流电机

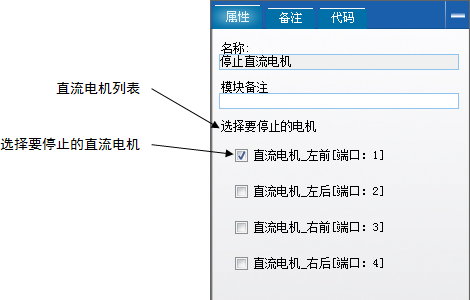
“停止直流电机”模块用于停止一个或多个直流电机,在其属性面板中“选择要停止的电机”列表中选择要停止的直流电机,未选择的直流电机不受影响,保持其驱动状态。
停止所有直流电机

“停止所有直流电机”用于停止机器人上所有直流电机。此模块无须设置属性可正常工作。
伺服电机驱动
“伺服电机驱动”模块用于驱动单个伺服电机,将指定端口的伺服电机从当前角度直接驱动到指定的目标角度。
“伺服电机驱动”模块有左、右2个容器,左容器放置要驱动的伺服电机端口,可放置“机器人端口”、整型常量、整型变量等。右容器放置表示伺服电机目标角度的数值,可放置整型常量、整型变量、结果为整型的算术表达式等。
右容器的数值表示伺服电机的角度,一般情况下正数为正角度,负数为负角度,如果伺服电机的属性勾选了“反转”时则相反。
“伺服电机驱动”模块无须设置属性可正常工作。

多伺服电机驱动

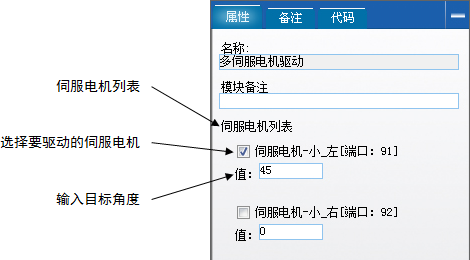
“多伺服电机驱动”模块用于驱动一个或多个伺服电机,将选定的伺服电机从当前角度直接驱动到指定的目标角度。
驱动时,在其属性面板的列表中选择要驱动的伺服电机,并输入目标角度。未选择的伺服电机不受影响,保持其当前角度。
多伺服步进驱动

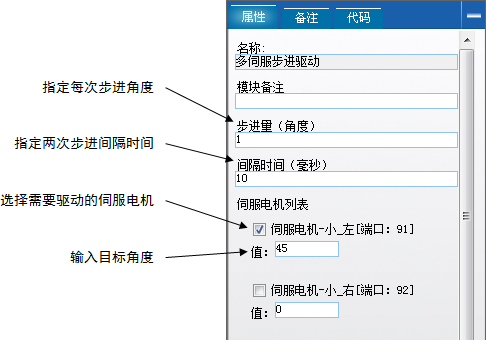
“多伺服步进驱动”模块用于驱动一个或多个伺服电机,将选择的伺服电机从当前角度,以指定的步进角度和步进间隔时间驱动到目标角度。
“多伺服步进驱动”需要在属性面板(见图 11)中指定各项参数,说明如下:
步进量(角度):指每次驱动时,各伺服电机的角度变化值,有效值在1~360之间;
间隔时间(毫秒):每两次步进之间的间隔时间,单位为毫秒(ms),最小值为10毫秒;
伺服电机列表:勾选需要驱动的伺服电机,未勾选的伺服电机保持其当前角度;
值:需要驱动的伺服电机的目标角度,单位为度(°),有效值在-180 ~ 179°之间;
“多伺服步进驱动”模块以下述方式执行:模块自动判断从当前角度到目标角度需要增加或减少角度,以指定的步进量改变伺服电机的角度,并等待指定的间隔时间,之后再次改变伺服电机的角度并等待直至到达目标角度。
此模块以堵塞方式执行,执行时间约为:
执行时间 = (最大角度差 ÷ 步进量) × 间隔时间
此模块驱动时,同时驱动所有选择的伺服电机,直到所有伺服电到达目标角度。角度差较小的伺服电机先达到目标角度,并保持不动,等待角度差较大伺服电机到达目标角度。
多伺服总时间驱动

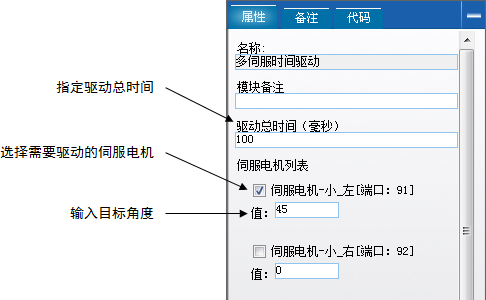
“多伺服总时间驱动”模块用于驱动一个或多个伺服电机,将选择的伺服电机从当前角度在指定时间内自动匀速驱动到目标角度。
此模块需要在属性面板(见图 13)中指定各项参数,说明如下:
驱动总时间(毫秒):设置驱动所有伺服电机达到目标角度的总时间,单位为毫秒(ms),最小值为100毫秒;
伺服电机列表:勾选需要驱动的伺服电机,未勾选的伺服电机保持其当前角度;
值:需要驱动的伺服电机的目标角度,单位为度(°),有效值在-180 ~ 179°之间;
“多伺服总时间驱动”模块以下述方式执行:模块自动计算各伺服电机的驱动步进量和间隔时间,并驱动它们。角度差较大的伺服电机旋转较快,角度差较小的伺服电机旋转较慢,在驱动总时间内同时到达目标角度。
此模块为堵塞执行,执行时间为“驱动总时间”的设定时间。
打印数据

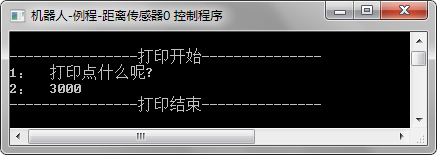
“打印数据”模块用于在程序运行窗口中显示文本、变量的值等。
此模块需连接程序流程中,有1个右容器,容器内可放置如侦测类、常量类、变量类等模块,打印数据执行时按照放入的先后顺序依次进行打印。
“打印数据”模块的执行结果在程序运行窗口(仿真窗口外的下方左侧)中显示,图 15是其显示实例。
延时

“延时”模块用于使控制程序等待指定的时间后再执行下面的模块,时间单位为毫秒(ms)。延时过程中,机器人保持原来的运动状态不变。此模块需要设置的属性如下:
延时(毫秒):输入需要的延时时间,单位毫秒(ms);
开始计时

“开始计时”模块用于设置控制程序将计时时间清零,并重新开始计时。在使用“获取计时”模块获取时间之前必须至少使作1次“开始计时”模块,否则计时时间将不确定。
“开始计时”模块无须设置属性可正常工作。
获取计时

“获取计时”模块用于获取从上次使用“开始计时”模块到当前经过的时间,单位为毫秒(ms)。此模块需放置到变量赋值、关系表达式、算术表达式等模块的容器内,构成为变量赋值、关系表达式、算术表达式等。
“获取计时”模块无须设置属性可正常工作。
传感器设置
“传感器设置”模块用于设置“障碍传感器”的检测距离。
此模块有左、右2个容器,左容器放置需要设置的“障碍传感器”的端口,可放置“机器人端口”、常量类、变量类模块;右容器放置设置的检测距离,可放置常量类、变量类模块。

简便传感器设置

“简便传感器设置”用于设置“障碍传感器”的检测距离。
此模块需要在属性面板中选择要设置的障碍传感器,并在其右容器放置设置值,可以是“常量int”、“变量引用int”模块。
“简便传感器设置”需要设置如下属性:
传感器列表:此列表显示了控制程序关联的机器人上所有设置了端口的部件名称,选择需要设置的“障碍传感器”的名称,选择其它类型的部件时设置无效。