入门教程-离线仿真
仿真导航
离线模式下使用仿真导航进入仿真,或使用仿真包快速进入仿真。在离线模式主窗口上,鼠标移到“开始仿真”按钮,单击“导航”,按以下步骤操作进入仿真:
● 在“选择任务场景”窗口的右侧的任务列表中,选择“官方作品”中的“训练-轨迹(单人)”任务,单击“下一步”;
● 在“选择机器人”窗口中,选择“机器人-走轨迹”机器人,单击“下一步”;
● 在“选择控制程序”窗口中,选择“程序-走轨迹”控制程序,单击“下一步”;
● 在“准备完毕?”窗口中,单击“准备完毕”;
● 在“保存快速仿真包”窗口中,输入仿真包名称“走轨迹”,单击“确定”,进入仿真;单击“取消”可不保存仿真包而进入仿真。
仿真操作
在离线仿真窗口中,单击控制栏的“开始”按钮,开始仿真。任务结束后单击“我知道了”或单击仿真窗口右上角的“×”按钮,退出仿真并返回到离线模式主窗口。仿真过程中单击右上角的“×”可终止仿真并返回到离线模式主窗口。
仿真窗口的布局如图 1。
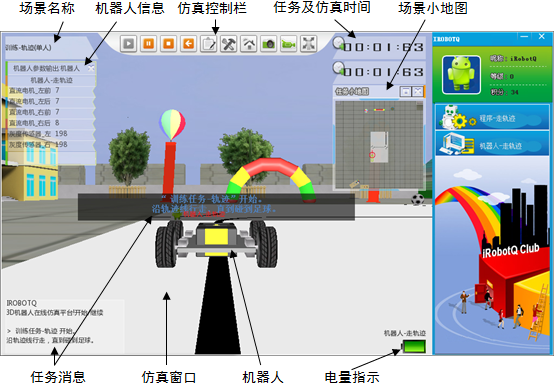
● 场景名称:显示当前仿真的场景名称;
● 机器人信息:显示机器人所有使用的直流电机、伺服电机、传感器的当前状态或返回值;
● 任务及仿真时间:上面的时间为任务时间,是从第一次仿真开始时用的所有时间;下面为仿真时间,是此次仿真开始后所用时间;
● 场景小地图:显示俯视视角中机器人在场景中大约位置和朝向;
● 任务消息:显示任务中的输出消息;
● 电量指示:显示各机器人的电量;
● 仿真控制栏:控制仿真的状态,其各按钮的作用见表 1。
| 图标 | 名称 | 作用 | 备注 |
|---|---|---|---|
 |
开始 | 开始仿真 | |
 |
暂停 | 暂停仿真 | 单击“开始”可继续 |
 |
停止 | 停止仿真 | 不可继续 |
 |
复位 | 场景、机器人复位到初始状态 | |
 |
编辑程序 | 在仿真时编辑控制程序,返回仿真后使用修改过的控制程序 | 停止或复位后可用 |
 |
编辑机器人 | 在仿真时编辑机器人,返回仿真后使用修改过的机器人 | 停止或复位后可用 |
 |
编辑场景 | 在仿真时编辑场景,返回仿真后使用修改过的场景元素,但规则脚本的修改在重新进入仿真时有效 | 停止或复位后可用 官方离线/在线任务场景不可编辑 |
 |
拍照 | 对当前仿真窗口进行拍照,保存在程序安装目录的DriverTemp目录中 |  |
变换视角 | 仿真视角在第一人称和第三人称之间切换 |
 |
设置方位 | 在仿真开始之前设置机器人的方位和朝向 | 未开始或复位后可用 |
使用仿真包
使用保存的“仿真包”可快速进入仿真包。在离线模式主窗口,将鼠标移到“开始仿真”,单击“仿真包”,在仿真包的准备完毕窗口的左侧选择仿真包,单击“准备完毕”即可进入仿真。
选中仿真包后,其“仿真包状态检测报告”中所有项都为“√”时,才可进入仿真包。某项为“×”时,表示其可能已被删除或重命名,则此仿真包不可用,需要重新仿真导航。