仿真操作用户手册-开始离线仿真
在离线模式下开始仿真需要有任务场景、机器人和控制程序,任务场景可以使用“官方作品”或“我的作品”,机器人和控制程序需要自行构建和编写。
仿真导航使用向导的方式依次选择任务场景、机器人、控制程序,并询问是否保存为仿真包,最后进入仿真。
关于构建机器人可参考“萝卜圈仿真 – 构建机器人用户手册”文档。
关于编写控制程序可参考“萝卜圈仿真 – 编写程序用户手册”文档。
开始仿真导航
在离线模式主窗口中,鼠标移到“开始仿真”,单击“导航”(如图 1)开始离线仿真导航。

“开始仿真”按钮说明:
仿真包:使用已保存的仿真包直接进入仿真,无须导航过程。
导航:以向导的方式选择仿真需要的任务场景、机器人、控制程序,可保存为仿真包,并进入仿真。
选择任务场景
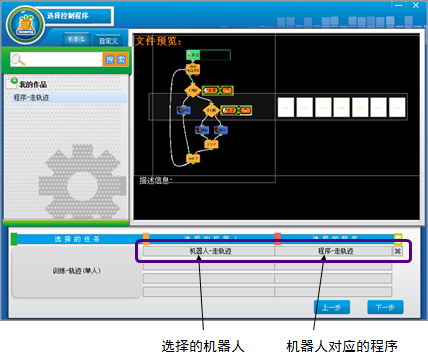
在“选择任务场景”窗口中(见图 2)选择仿真时的任务场景。在“官方作品”或“我的作品”列表中单击任务场景的名称,单击“下一步”,或双击任务场景名称。

“选择任务场景”窗口包括以下几部分:
作品列表:“我的作品”中列出了用户制作的任务场景、机器人和控制程序。在“选择任务场景”窗口中还包括软件内置的“官方作品”。
预览:显示选择的文件的预览图。显示官方任务场景的规则说明,用户任务场景的各视角图像;显示机器人的各视角图像;显示控制程序的截图。
选择的任务:显示导航过程中选择的任务场景名称;
选择的机器人:显示导航过程中选择的机器人名称,最多有4个;
选择的程序:显示导航过程中选择的控制程序名称,最多有4个;
导航控制:控制导航进度和操作的按钮;
选择机器人
在“选择机器人”窗口中选择仿真时使用的机器人。在“我的作品”列表中单击机器人的名称,单击“下一步”,或双击机器人名称。
选择机器人时注意:
灰色的名称是不符合任务场景中关于机器人的限制规则,不能选择。鼠标移到这些机器人的名称上时,会显示不符合的原因。
这些限制的原因有机器人的重量、尺寸、某个部件的数量、使用了不允许的部件等多种原因。可以关闭仿真导航,重新编辑机器人以符合任务场景的要求,重新开始导航。
选择控制程序
在“选择控制程序”窗口中选择机器人使用的控制程序。在“VPL”的“我的作品”列中单击控制程序的名称,单击“下一步”,或双击控制程序名称。
在导航窗口下方的表格中,显示了选择的机器人及其对应的控制程序,如图 3所示。
准备完毕
在“准备完毕”窗口(见图 4)查看选择的任务场景、机器人、控制程序。
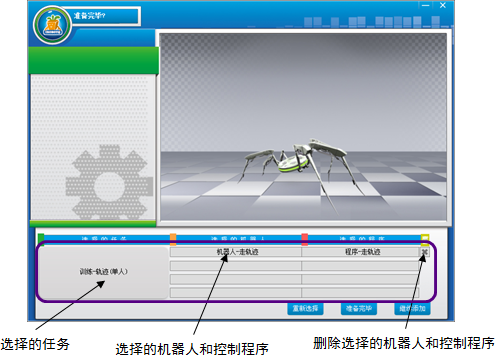
准备完毕:对于选择的任务场景、机器人和控制程序确认无误,单击“准备完毕”,进入导航下一步。
重新选择:如需要重新选择任务场景,单击“重新选择”,从第2.2章节开始重新选择任务场景,并需要重新选择机器人和控制程序。
继续添加:在离线仿真中需要使用超过1台机器人,单击“继续添加”,重复第2.3和2.4章节的过程,完成添加多个机器人及其对应的控制程序,选择完毕后仍会出现“准备完毕”窗口。
删除选择的机器人和控制程序:单击列表中显示的机器人和控制程序某行之后的“×”,删除此行上选择的机器人和控制程序,单击“继续添加”可重新选择机器人和控制程序。
离线仿真中使用多个机器人和控制程序时的注意事项:
选择的“任务场景”中的“起始点”的数量须等于或大于选择的机器人数量,否则无法进行仿真。在进入仿真后在列表中选择各机器人使用的“起始点”,机器人与“起始点”必须一一对应。
可以将同一个机器人重复添加。
可以将同一个控制程序重复添加。
保存仿真包
在“保存快速仿真包”窗口中(见图 5),选择“保存进入”或“不保存进入”后进入仿真。
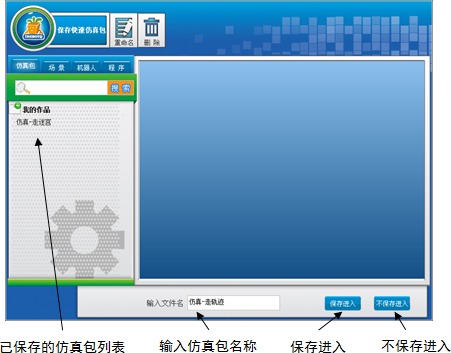
保存进入:指将选择的任务场景、机器人和控制程序的组合保存成仿真包,并进入仿真,使用此选项时,在“输入文件名”的文本栏中输入仿真包的名称,再单击“保存进入”。
不保存进入:指使用选择的任务场景、机器人和控制程序进入仿真,但不保存这种组合。仅用于单次仿真,再次仿真时需要重新使用仿真导航。
仿真包列表中列出了已保存过的仿真包,如果需要使用此次的导航内容将其中某个仿真包覆盖,在保存时可单击列表中的仿真名称,此仿真包的名称会出现在“输入文件名”的文本栏中,单击“保存进入”,在询问是否覆盖时,单击“是”。
使用仿真包
离线模式中可以使用仿真包快速进入仿真。仿真包保存了导航时选择的任务场景、机器人和控制程序的组合信息,当这些文件都存在时,可快速进入仿真,而无需导航。
离线模式主窗口中鼠标移到“开始仿真”,单击“仿真包”进入“准备完毕”窗口。
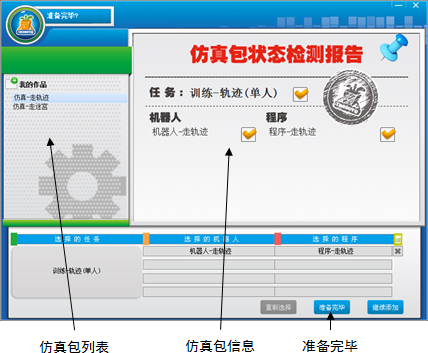
仿真包列表:显示已保存的所有仿真包名称;
仿真包信息:显示选择的仿真包的“状态检测报告”,其中包括了“任务场景”、“机器人”和“控制程序”,某个项目之后显示“√”表示此文件存在,显示“×”表示此文件不存在,可能被重命名或已删除;
在“仿真包列表”中单击选择一个仿真包,如无提示“仿真包缺少文件”,则此仿真包可用。可查看其检测报告,了解此仿真包使用的“任务场景”、“机器人”和“控制程序”,单击“准备完毕”,直接进入仿真。
如仿真包提示缺少文件时,单击提示窗口的“确定”,在检测报告中查看缺少的文件。缺少文件的仿真包已不可用,可在“资源管理”中将其删除。