驱动和传感器说明-画笔模块
说明
笔模块的是可以用来在画纸上绘图的工具。画笔模块有两种工作方式:Point(画点模式)和Line(画线模式)。画笔的颜色和尺寸可选择。
画笔尺寸为1~64,当画笔尺寸设置为10时,画出的线条宽度为一个1x1x1的安装块的宽度。
提示:画纸的接缝处会出现断痕。画笔颜色设为透明色时,画纸会被刷为透明
相关编程模块
与画笔相关的编程模块是“驱动”类中的:“开始画”、“停止画”、“设置画笔颜色”、“设置画笔尺寸”4个模块如图 2所示。

“开始画”是驱动画笔模块开始工作的命令。
“停止画”是驱动画笔模块停止工作的命令。
“设置画笔颜色”是驱动画笔在使用过程中更改颜色的命令。
“设置画笔尺寸”是驱动画笔在使用过程中更改尺寸的命令。
实例
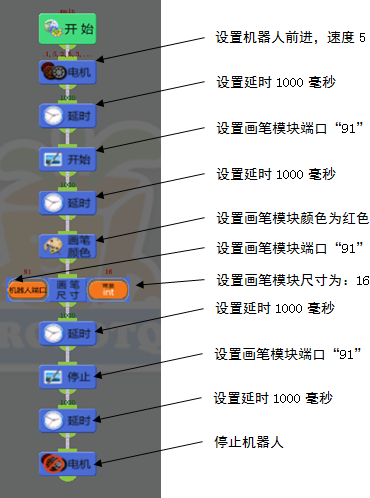
此实例机器人在铺在地面上的画纸上以“5”的速度前行1000毫秒后,开始画以“5”的速度前行1000毫秒距离的一段宽度为“6”的黑线,接着再画以“5”的速度前行1000毫秒距离的一段宽度为“16”的红线,停止画线,机器人继续前行1000毫秒后停止。
机器人——“机器人-实例-画线机器人”
控制程序——“程序-实例-画线程序”
实例机器人
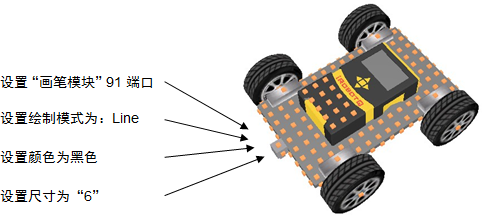
“机器人-实例-画线机器人”的机器人如图 3所示。画笔安装在主机正后方,方向朝着机器人底部。
画笔端口设置为:“91”;绘制模式为:Line;颜色为黑色;画笔尺寸为:“6”。
实例程序