驱动和传感器说明-滑杆模块
说明
滑杆模块是一种可以滑动的配件,依据滑动距离分为三种规格:1x1x5、1x1x9、1x1x15,可滑动距离各是5个、9个、15个1x1x1安装块的长度,实际距离为40、80、140(每个1x1x1安装块的尺寸为10)。
滑杆模块滑动的起始点在设置在模型的一端,为目标点0点位置。通过程序驱动,滑动点可以滑动到 [0,最大滑动距离] 范围内的任意位置。

相关编程模块
与滑杆模块相关的编程模块有“驱动”类中的“单滑杆驱动”、“多滑杆驱动”2个模块,如图 2所示。
“单滑杆驱动”是驱动单个滑杆的编程模块,在使用时后面必须加延时,延时至少为1000毫秒。此模块有2个容器,左容器放置表示滑杆模块端口号的模块,可放置“机器人端口”、“常量int”、“变量int”等。右容器放置表示滑杆模块目标点位置的模块,可放置“常量int”、“变量int”等。
“多滑杆驱动”是多个滑杆一起驱动的编程模块,堵塞执行1,使用时参数设置见图 3所示。
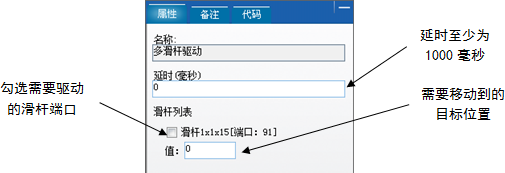
1关于“堵塞执行”见“相关术语”中的解释
实例
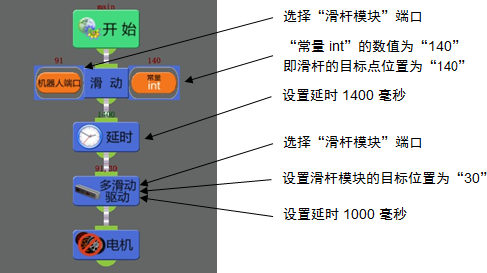
此实例机器人在原地,将安装在滑动点上的部件滑动到“140”的目标位置,然后再滑回到“30”的目标位置,停止。
机器人——“机器人-实例-滑杆机器人”
控制程序——“程序-实例-滑杆程序”
实例机器人
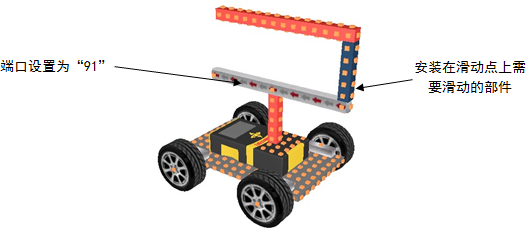
“机器人-实例-滑杆机器人”的机器人如图 4所示。一个1x1x15规格滑杆安装在主机上方竖立的安装块上,然后在滑动点上装了一个L型的安装块。
实例程序