驱动和传感器说明-直流电机
说明
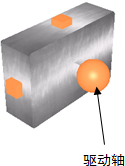
直流电机(如图 1)是一种驱动轴可连续旋转的驱动模块,其旋转速度可调,转向可正转或反转。
直流电机通常用于机器人运动。4个直流电机配合轮子,可实现机器人的前进、后退、左转、右转和停止等动作,几乎所有采用轮式运动的机器人都要使用直流电机。
在驱动直流电机时,可设置其速度和转向,或使其停止。萝卜圈仿真中的直流电机的速度通常在0-20之间,一般应用可使用10的速度。
直流电机有2种安装点,方形安装点用于安装,圆形安装点为驱动轴。驱动直流电机时,其圆形安装点上安装的部件可以转动。
正转/反转:默认的旋转方向定义为:从直流电机内部向驱动轴方向看,逆时针方向转动是正转,顺时针方向是反转。设置为“反转电机”旋转方向相反。
直流电机属性设置
直流电机可设置名称、端口、反转电机等属性(图 2)。
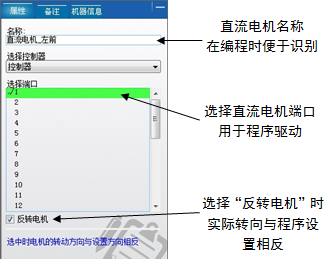
名称:直流电机在添加到编辑区时会自动按序号命名(第1个除外),修改成有意义的名称有助于在编程时识别具体的直流电机。
端口:所有要驱动的直流电机都需要为其分配一个端口,可用范围为1~30。在编写控制程序时,没有分配端口的直流电机不会出现在直流电机列表中,无法使用。
反转电机:选中“反转电机”属性时,控制程序在驱动其正转时,直流电机反转,反之正转。
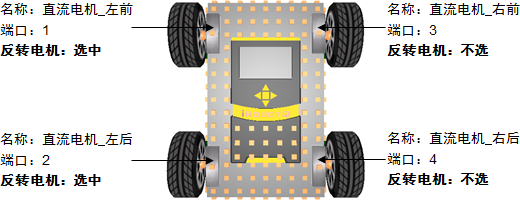
通常情况下,4轮结构的机器人将左侧2个直流电机设为反转,右侧2个不设置反转。在编程时驱动机器人时,可按照一般思维设置左、右两侧的转向,如直行——都正转,左转——左侧反转、右侧正转等。
相关编程模块
图形化编程中与直流电机相关的编程模块有“驱动”类的“直流电机驱动”、“多直流电机驱动”、“停止直流电机”、“停止所有直流电机”4个模块,如图 3所示。

流电机端口号的整型类模块,可放置“机器人端口”、“常量int”、“变量int”等模块。右容器放置设置直流电机的速度和转向的整型类模块,可放置“常量int”,“变量int”等,数值为正时直流电机正转,为负时反转1。
“多直流电机驱动”用于驱动一个或多个直流电机。此模块没有容器,在其属性面板(如图 4)中列出机器人上所有的直流电机2,选择需要驱动的直流电机,输入其速度和设置转向,未选择的直流电机不会被驱动,保持之前的驱动状态。
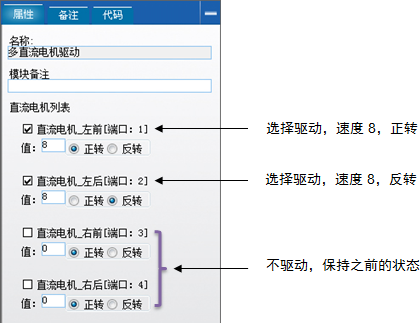
选择需要停止的直流电机,未选择的直流电机保持之前的状态。
“停止所有直流电机”用于停止机器人上所有直流电机。此模块没有容器,也无需设置参数,使用此模块将停止机器人上所有的直流电机。
直流电机停止后不会被刹住,轮子在受到外力的作用下(如重力)会被转动。
1如果设置了此直流电机为“反转电机”,它的实际转向侧相反
2设置了端口的直流电机才会出现在列表中。
实例
此实例使机器人完成“前进”→“左转”→“前进”→“停止”一系列动作,控制程序中使用了“多直流电机驱动”、“停止所有直流电机”、“延时”等模块。关于“延时”模块请参考“延时模块”的内容。
机器人——“机器人-实例-直流电机”。
控制程序——“程序-实例-直流电机”。
机器人
机器人上安装有4组“直流电机”和“轮子”用于驱动机器人行进,完整的机器人和各直流电机的属性如图 5所示。
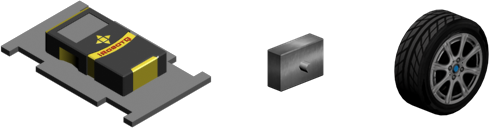
机器人使用的“控制器”、“直流电机”、“轮子”如图 6所示。
提示:本文其它实例无如特殊说明,其基本结构(控制器、直流电机和轮子)均使用本实例的安装方式和属性设置。
控制程序
“程序-实例-直流电机”的流程及各模块设置如图 7所示。
