驱动和传感器说明-介绍
本说明文档以实例方式介绍了“萝卜圈三维机器人在线仿真平台”(以下简称“萝卜圈仿真”)中驱动和传感器部件的详细说明和使用方法。
阅读本文档之前应掌握“萝卜圈仿真”的操作方法,包括构建机器人、编写控制程序、使用仿真导航及仿真的操作,本文档不涉及这些操作内容。关于萝卜圈仿真平台的操作方法可参考“萝卜圈仿真-入门教程”等相关文档。
此教程实例所有任务场景使用“场景-实例-驱动和传感器说明”场景,及各实例中的机器人和控制器均可在萝卜圈网站(www.iRobotQ.com)的“资料下载”页面下载,下载后在离线模式主窗口的“资源管理”中导入,在仿真导航时可在“我的作品”中使用这些场景、机器人和控制程序。
使用实例时可自行搭建机器人和编写控制程序,同时每个实例都有提供机器人和控制程序的图片可供参考。
术语解释
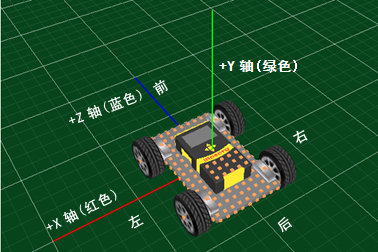
坐标系统:萝卜圈仿真采用的坐标系统如图 1所示,红、绿、蓝色线条分别表示X、Y、Z轴的正方向,XZ平面为水平面。
前方:模型的前方是指模型在添加到编辑区时,未经任何旋转时,朝向+Z轴(蓝色)的方向为前方(见图 1)。
提示:在萝卜圈仿真1.1.xxxx版本中,蜡烛不能被距离传感器、障碍传感器、接触传感器检测到,在1.2.xxxx及以上版本中可以被检测到。